一、项目意义
双臂机器人是一种典型的仿生机器人,和传统的单臂机器人相比具有更好的作业能力,能更好地完成拟人化作业。该项研究的科学意义在于揭示人工复杂作业的技能原理,为研制具有技能作业功能的双臂机器人提供理论依据。应用价值在于面向复杂作业任务,研制具有更高技能作业功能的双臂机器人应用系统,开拓机器人的应用领域,提升行业制造与作业水平,创建双臂机器人产业。
二、研究内容
本项目重点研究双臂机器人作业工艺、作业技能和实现技术,研制机器人仿生试验台,面向典型行业制造工艺,揭示和挖掘人工技能作业原理、数据及模型;基于双手作业过程,研究人工作业过程中臂-腕-掌-指的运动规律,进行机器人仿生示教技术研究和系统开发,实现机器人复杂技能作业;面向不同行业,研究双臂机器人成套装备与系统,提升制造业水平,推动双臂机器人技术发展。
三、应用前景
人工技能作业具有行业特征,本项研究以行业需求为牵引,面向地方产业和国家战略需求,研究行业制造工艺、作业技能和双臂机器人成套装备,在典型行业内推广应用,并不断向其它行业拓展。面向极端作业、危险作业和复杂作业等技能作业环境,研制专用双臂机器人技能作业智能系统。通过本项研究建立双臂机器人研究方向,研究成套yabo亚博88的解决方案,创建双臂机器人产业。
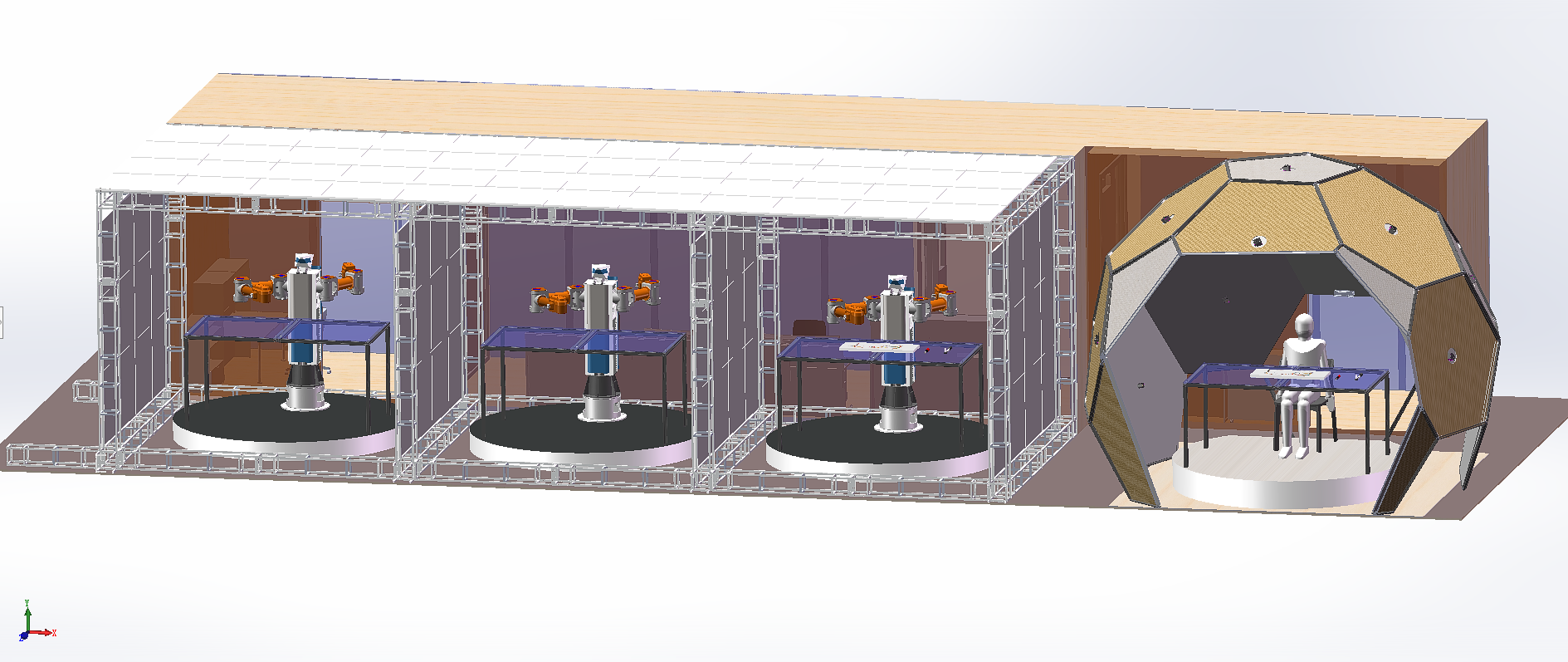
机器人仿生试验台

双臂机器人装配生产线